自然界中微生物和动植物面对各种刺激(光、热、湿度等)产生的响应运动使系统能够适应外部环境的变化,并为新型软驱动器的构建提供了足够的灵感。最近,由于纤维软体驱动器具有弹性、可连续变形、能顺应复杂环境以及可编程等诸多优势,在传感器、可穿戴设备、人造肌肉、生物医学和能源收集等诸多领域具有广阔的应用前景。然而,目前纤维态软体驱动器制备过程繁杂、生产效率较低且其驱动模式相对单一,响应速度慢等缺陷限制其多种应用场景。因此如何规模化开发具有多种刺激和快速响应的纤维软体驱动器仍然是一个巨大的挑战。
鉴于此,江南大学魏取福教授、吕鹏飞研究员和安徽工程大学凤权教授团队合作提出了通过一种简单的干法纺丝和涂层策略,规模化生产具有光、电、热多刺激响应和快速大致动变形的纤维软体驱动器。该纤维软体驱动器不仅结合了LCE的可逆形状变形特性和PDA@MXene的优异的长效光电特性,而且还实现了光、电、热多刺激响应快速驱动。为了验证纤维软体驱动器的光电领域应用前景,研究人员开发了光驱动的人工肌肉、微型光热智能电路开关和光驱动自适应智能窗系统。这项工作提出的策略为先进的多功能软体驱动器开辟了一个新的技术领域。相关工作以题为“Scalable Functionalized Liquid Crystal Elastomer Fiber Soft Actuators with Multi-Stimulus Responses and Photoelectric Conversion”的论文发表在国际权威期刊《Materials Horizons》上。该研究工作得到了国家自然科学基金、江苏省自然科学基金和江南大学高层次人才引进项目等项目支持。

研究者首先选用具备优异光热特性和导电特性的MXene纳米片作为光热转换分子,通过具有优异光热性能和良好粘附特性的PDA改性设计制备具有长效光电特性和粘附性能的PDA@MXene墨水,随后通过干纺技术和两步交联策略连续化生产具备可逆驱动形变的LCE长纤维软体驱动器,最后采用等离子体处理和涂层技术制备PDA@MXene/LCE复合纤维软体驱动器,如图所示。研究表明,PDA改性处理不仅能有效抑制MXene表面氧气渗透,而且有助于实现PDA/MXene功能层与LCE纤维的稳定界面结合,从而赋予纤维软驱动器高效光热性能和长效电热特性。在外界光/热/电等多重刺激下,PDA@MXene/LCE纤维软体驱动器可以在0.4秒内产生超过50%以上的驱动变形。
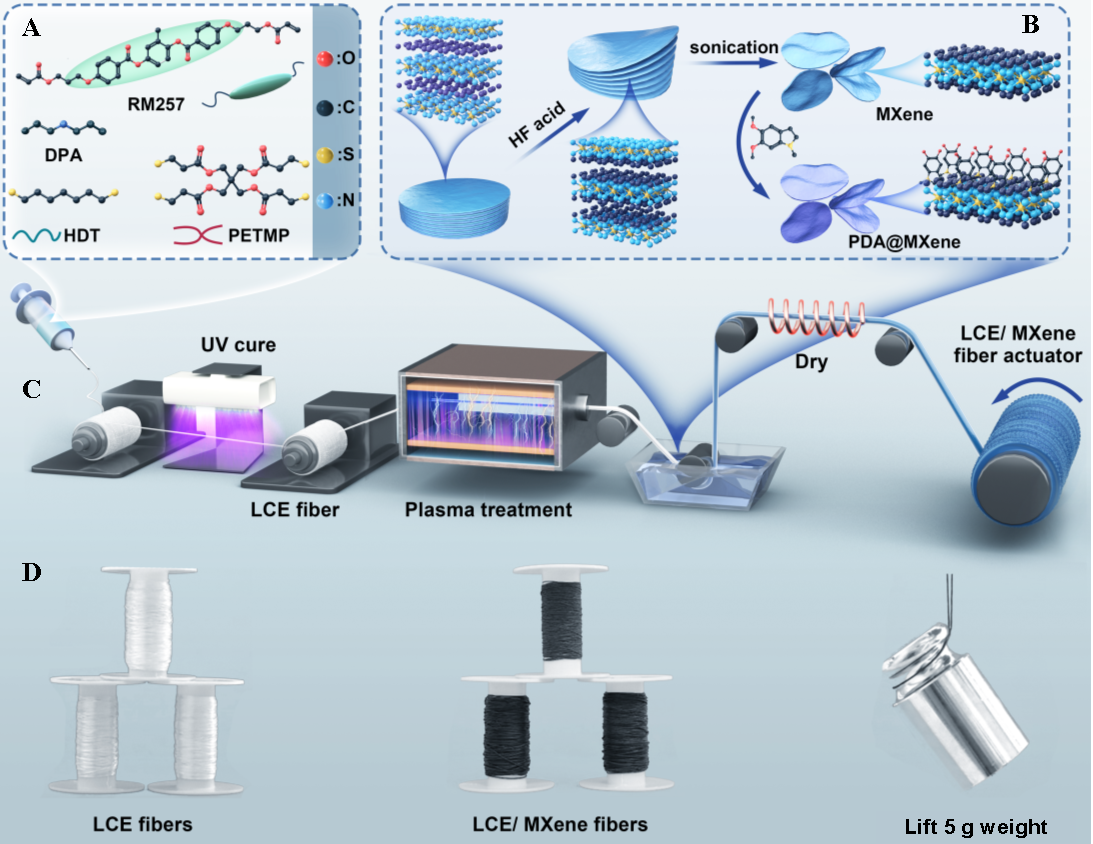
图1 LCE复合纤维软体驱动器的规模化制备过程示意图
研究者发现LCE纤维在光、热、电等刺激时均表现出快速稳定的可逆驱动形变,而且纤维软体驱动器具备良好的力学性能,其断裂强度达到52.33±1.95MPa,可以满足日常纺织品编织要求。其响应速度最快达到0.4s,致动变形率最高可以达到60%,在热驱动条件下,所制备的LCE纤维可以轻松地举起比LCE纤维多1000倍的重量,纤维驱动速度和加速度最高可达1071 cm/s和13125 cm/s2。此外,经过多次重复使用,制备的LCE纤维仍保持稳定的驱动速率,表明具有优异的重复使用性能,如图所示。

图2 LCE纤维软体驱动器的热驱动性能
为了进一步验证纤维软体驱动器在光电领域的应用前景,研究者以PDA@MXene/LCE纤维软体驱动器为基础构建了三种微型光电器件,并系统分析了其光电驱动过程。研究者首先设计制造了一种NIR光控人工肌肉模型,以复合纤维软体驱动器模拟人工肌肉,研究者发现在NIR光的连续刺激下纤维驱动器根据光热转换机制快速升温,从而使纤维逐渐收缩变形,导致人造肌肉模型弯曲45 °,手臂弯曲角度随着近红外光强度的增加而逐渐增加,弯曲过程最大角速度和角加速度分别可达7.42 °/s和75.66 °/s2。由于纤维软体驱动器具备光电快速响应驱动能力,研究者将纤维驱动器制作了一种新型远程光/热双控智能电路开关,研究发现,当外部环境中没有近红外光和热源刺激时,设计的微型电路开关保持静止,确保电路闭合,并点亮LED指示灯。一旦纤维软体驱动器受到热或近红外光刺激时会迅速发生致动收缩变形,导致电路断开并关闭LED灯。当去除近红外光源或热源刺激时,纤维软体驱动器的长度又逐渐伸长至原始状态,智能电路开关恢复其原始形状并再次闭合电路。研究表明智能电路开关对近红外光和温度刺激下具备较强的敏感性,响应时间最低达到0.5 s和0.1 s。其响应灵敏度明显优于市场上使用的光热电路开关(9-30 s)和相关文献的结果(6-10 s)。而且,研究者发现智能电路开关在温度和近红外光交替刺激104次后仍表现出良好的电路调控特性,其重复使用性能优良,如图所示。
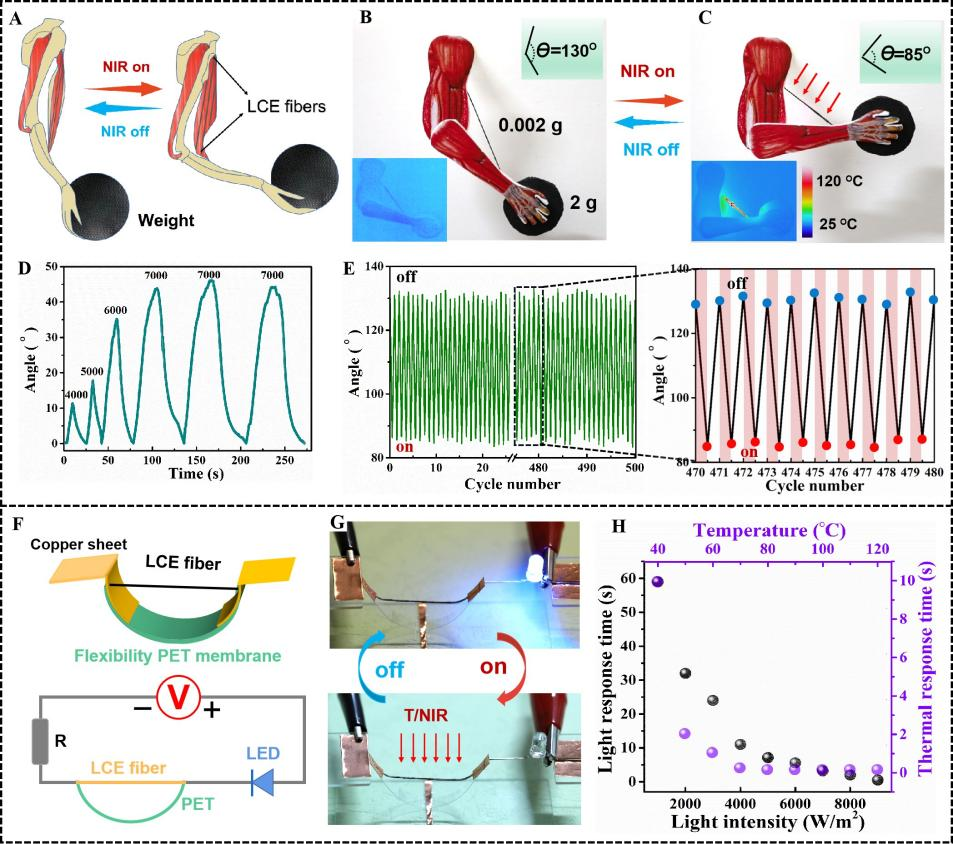
图3 基于复合纤维软体驱动器构建的人工肌肉和光热智能开关驱动过程示意图
由于复合纤维软体驱动器具备良好的柔韧性,而且具备长效光电驱动特性,研究者以纤维驱动器为基础编织了一种光驱动窗帘,并将其与透明的碲化镉太阳能电池集成,构建新型自适应智能窗系统。研究者发现智能驱动窗帘能够在光和热刺激下实现自发可逆驱动,从而达到智能调节的目的。同时,在窗帘的智能驱动过程中,太阳能电池可以有效吸收光能并将其转化为电能为房屋供电。整个能量窗集成系统完全自发、智能调节,实现了智能驱动与能量采集的有机耦合(如图所示)。作为一种将智能驱动与自发能量收集相结合的概念系统,它将为未来的智能建筑和能量采集提供一种新的设计方式。
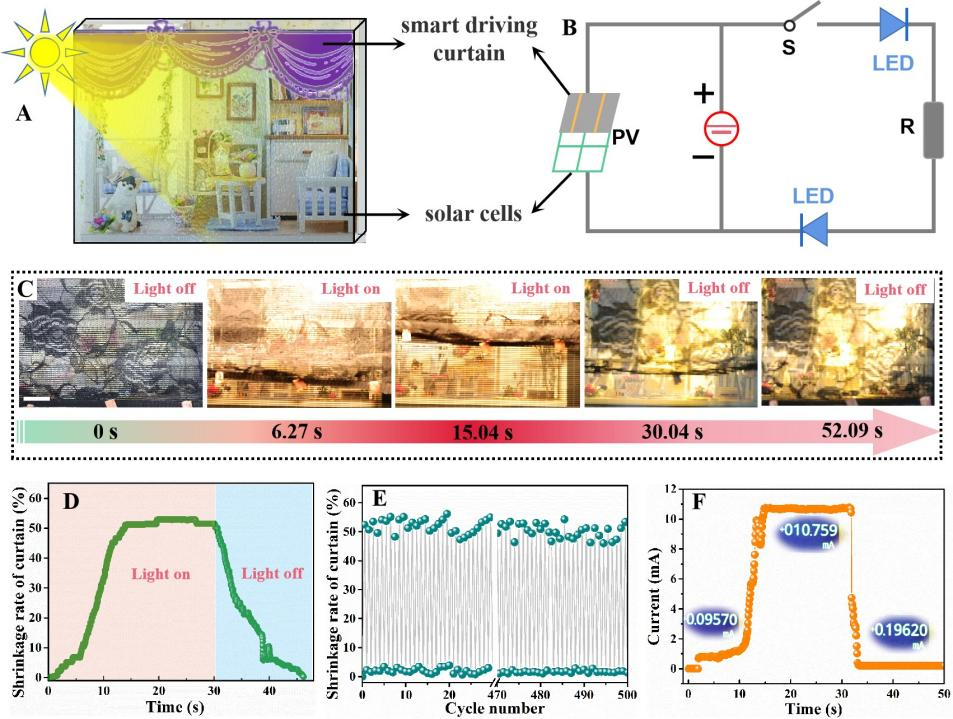
图4 基于复合纤维软体驱动器构建的自适应智能窗系统驱动过程示意图
总结
研究者通过简单的干法纺丝和两步交联策略,规模化制备了一种新型多响应LCE/MXene长纤维驱动器。同时,系统的阐明了纤维软体驱动器对光、电和热刺激的响应驱动能力。研究表明,所设计的纤维驱动器不仅能够对外部刺激具备稳定的快速响应能力(~0.4 s),而且还具有优异的长效光电特性。利用纤维驱动器良好的光热和导电特性,研究者成功设计了近红外光控人工肌肉和光热智能控制电路开关。此外,研究者利用PDA@MXene/LCE纤维软体驱动器构建了一种新型自适应智能窗系统,可以很好地集成窗帘的智能驱动特性和太阳能电池的能量收集特性。这项工作为纤维软体动器的开发并设计具有仿生智能、集成多功能柔性电子设备、人机交互以及其他先进生物医学技术的无绳软机器人或机器提供新的动力。
全文链接:
https://doi.org/10.1039/D3MH00336A


